- 登录|
- 免费注册

- 必优商城
- 必优专柜
- 收藏必优
- 帮助中心
- 关于我们
- 必优CRM
- 客服电话:0755-23002766 技术支持:18002563560

选择合适的滤波器以适合您的测量应用程序的重要性
传感器输出的质量和可靠性常常受到外部或环境因素(如污垢、灰尘、划痕、水)的影响,这些因素使对这些输出信号的解释和进一步处理变得复杂。各种形式的信号‘噪声’,无效的测量值或信号峰值(尖峰)只是一些影响,可以减少如果使用适当的智能平均或滤波器设置。
通过为应用程序应用最合适的滤波设置或平均技术,将有助于平滑或消除测量值中的任何尖峰,从而使测量结果更容易、更可靠地解释。
虽然滤波是所有测量传感器都需要考虑的一个因素,但在使用非接触式激光位移传感器时,特别重要的是,在非接触式激光位移传感器中,通常存在较快的测量速率或被测量的目标物体移动(即动态测量)。
因此,必须检查传感器供应商的数据表,以了解传感器采用的过滤或平均技术的类型。如果信息未包含在数据表中或以某种方式被伪装,您将需要询问它。一些成本较低的激光传感器供应商可能会在数据表上引用较高的测量速度,这只能通过使用高平均滤波器才能在现实世界中实现。相反,传感器是否使用高级/智能滤波的一个很好的指标是数据表提供了关于“静态”和“动态”性能数据的信息(例如响应时间、分辨率、线性度)。
一般情况下,高性能激光传感器采用先进的或智能的滤波来实现真实世界的测量性能。其他成本较低的激光传感器倾向于使用基本平均滤波器,如“平均测量”或“移动平均”,这往往导致传感器性能缓慢。
平均测量
大多数成本较低的激光传感器使用“平均测量”。然而,选择这种平均技术只推荐用于静态或缓慢变化的测量值。根据传感器的类型,可以使用这种技术对测量值或视频信号进行平均处理。测量值的平均处理在传感器本身中进行,在计算距离值之后,并在通过所选接口输出之前进行。测量速率或数据速率独立于平均。然而,降低产出率通常是可能的。以下是三种最常见的平均技术。
算术平均
最基本的平均技术是算术平均。形成算术平均值M,并通过连续测量值的可选数N输出。这种方法减少了输出数据量,因为测量值是最初收集的,并且只有在每n个测量值之后才输出。
示例,其中N=3
…01234…转化为2+3+4/3平均n
…34567…转化为5+6+7/3平均n+1
移动平均
算术平均值是用数N(1…)来计算的。128)的顺序测量值(窗口)和输出根据以下公式:
示例,其中N=7
…012345678转化为2+3+4+5+6+7+8/7平均n
…123456789转3+4+5+6+7+8+9/7平均n+1
这样做时,每个新的测量值都会被添加到窗口中,并删除最老的值。这样,即使在相对较大的测量值“跳跃”下,也可以实现较短的过渡响应时间。
虽然移动平均技术可以用来平滑测量值(并提高分辨率),但它只适用于目标材料或表面粗糙度较低的物体,也可用于过渡响应时间较短的应用,或在无尖峰连续信号噪声的情况下使用。
递归平均
在此方法中,将每个新的测量值作为加权值添加到以前的平均值之和中。因此,递归平均可以很强地平滑测量值。然而,对于测量值的跳跃(低通行为),它需要极长的瞬态恢复时间.对于静态测量,递归平均允许在没有任何强尖峰的情况下对信号噪声进行高度平滑。
虽然递归平均不推荐用于高度动态测量,但它在一些动态测量应用中是有用的,例如,消除粗糙表面的粗糙度或结构(例如,具有均匀凹槽的零件或粗加工零件)。
中位
使用中值技术,将预先定义的测量值的值按大小排序,并输出中等值(而不是平均值)。中值被用作滤波器类型,主要用于抑制单个干扰脉冲。使用中值法对信号进行实际平滑并不是很强。但是,在计算中值之后,可以采用附加平均法。
示例,其中N=7
…240124513…测量值排序为0112345(中位数=2)。
…401245134…测量值排序为1123445(中位数=3)。
中位技术最好在恶劣、灰尘或肮脏的环境中使用,以消除来自污垢颗粒的干扰(即抑制单个干扰脉冲)。该技术也可用于有边缘跳跃和短,强信号峰值发生的地方。
智能滤波
一些高性能激光传感器供应商开发了先进的(智能)滤波技术,以进一步优化其传感器的测量结果。有些传感器甚至提供多种滤波器类型,使用户能够选择最适合他们的测量任务。与平均相比,这些智能滤波器只在特定的前提条件下输出或抑制测量值。
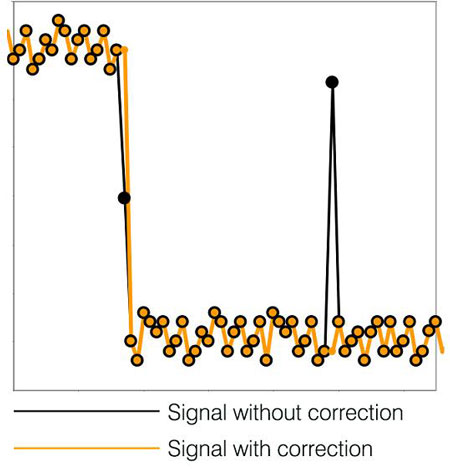
尖峰校正滤波器
这种特殊的过滤形式被用来从相对恒定的测量值过程中移除非常高的尖峰,同时保留任何较小的尖峰。使用中间值可以消除所有的尖峰。评估一个测量是否是一个尖峰(离群点)是基于一个特定数目的先前有效读数的平均值。与下一个值的允许偏差是使用公差范围计算的。如果新的测量值偏差过大,则将校正到以前的值。还必须说明要更正的连续测量值的最大数目。
尖峰校正消除了具有可调阈值的尖峰,因此可用于快速运动物体的高度动态数据采集。它也适用于测量跳跃,特别是那些干扰峰,边缘跳跃和一些弯曲的边缘跃迁。在使用其他平均技术之前,可以进行尖峰校正。
动态噪声抑制滤波器
该智能滤波器专门用于微型Epsilon激光位移传感器,消除了测量值的噪声,但保持了测量信号的原始带宽。为此,动态地计算噪声带,并且只有在超过或没有达到噪声带时才输出测量值的变化。然而,在动态计算的限值中的值变化作为信息“丢失”。导致信号变化的值比计算的噪声大3倍。随着信号方向的改变,由于限值而产生小的迟滞效应,因为必须首先超过它们才能引起改变。
与其他平均方法不同的是,动态噪声抑制不是基于来自经典统计的定义,而是基于MicroEpsilon开发的软件算法。
边缘滤波器
微型Epsilon激光传感器的独特之处是边缘滤波技术,它在边缘或表面变化等过渡时期平滑信号,从而避免信号过度。这使得用户能够精确地检测边缘,并避免模糊信号(斜率的变化)。滤波器阈值标志着必须超过的值,才能被识别为信号变化,而不是表面粗糙度。
结语
在选择激光传感器之前,请始终检查供应商数据表中有关测量平均值或滤波的声明。如果信息不存在,请向供应商询问更多细节。如果有疑问,请与供应商讨论您的测量应用,供应商应该能够为您的任务推荐最合适的传感器和过滤器。