

目录
一操作前注意事项
二操作总体流程
三操作详解
1. 主界面
2. 触发设置
3. 拍摄设置
4. 轮廓设置
5. 注册主控
6. 位置补正
7. 测量设置
8. 输出设置
操作前注意事项
1.因本机采用扇形扩散的激光和感光光学系统,根据对象物体的形状,X测量范围边缘区会产生死角,请确认死角对测量是否有影响。建议将测量物体置于X测量范围内的中心区域,死角较少,如图1。

图1
2.安装传感器头时,请避免照射对象物体的激光以及从对象物体返回的激光被墙壁或其他物体遮挡,如图2。

图2
3.反射到垂直于对象物体所置于的水平面附近的墙壁时会产生杂散光,请确认是否对测量结果产生不利干扰,如图3

图3
操作总体流程
一激光轮廓仪的基本工作原理,如图4:

图4
二操作总体流程
1. 参照表1的X,Z向测量范围安装激光轮廓仪

表1
2. 配置轮廓仪的触发设定:以连续实时方式拍摄取像,或是外部信号触发取像,或是以编码器脉冲输入的方式触发取像。
3. 配置轮廓仪的拍摄设定:主要内容为调节内置相机的曝光值,从拍摄图片中提取轮廓线时的图像学处理参数调整,以及选择相机的取像范围。目的是为了根据用户需要从选定的视场内获取稳定的轮廓图像。
4. 配置轮廓仪的轮廓设定:主要内容为对提取的轮廓线进行水平方向旋转补正以及高度方向缩放补正,目的是为了获取准确的测量结果,激光轮廓仪初次安装后执行此步骤,之后只需在轮廓仪安装位置有调整或者是定期维护时进行。
5. 配置轮廓仪的注册主控:主要内容为拍摄并保存一副原始图像,后续如果和原始图像形状相似的待测工件在测量时因位置会发生一定变动,需要进行位置补正时会用到注册的该原始图像。
6. 配置轮廓仪的位置补正:主要内容为X补正,Z补正,θ补正。当待测物体和注册的图像相比,发生了位置的变动时,如果直接去测量固定的区域时可能会导致测量结果不准确,位置补正的目的是为了找出待测物体和注册图像之间发生的位置偏差而去进行补偿,从而获取准确的测量结果。
7. 配置轮廓仪的OUT测量设定:主要内容为选择需要测量的内容,以及配置该测量内容的详细参数,例如高度测量,高度差测量,位置测量等等。
8. 配置轮廓仪的输出设定:主要内容是设置轮廓仪的测量结果以何种方式对用户的PLC,PC等工控设备进行输出,以及输出的相关参数配置。
以上操作在软件的“实时设定”页面依次进行,如图5。

图5
操作详解
主界面
主界面用户区有3个子窗体,分别是测量结果窗体,图像数据窗体,轮廓数据窗体。3个子窗体可以调整大小和位置,如图6。
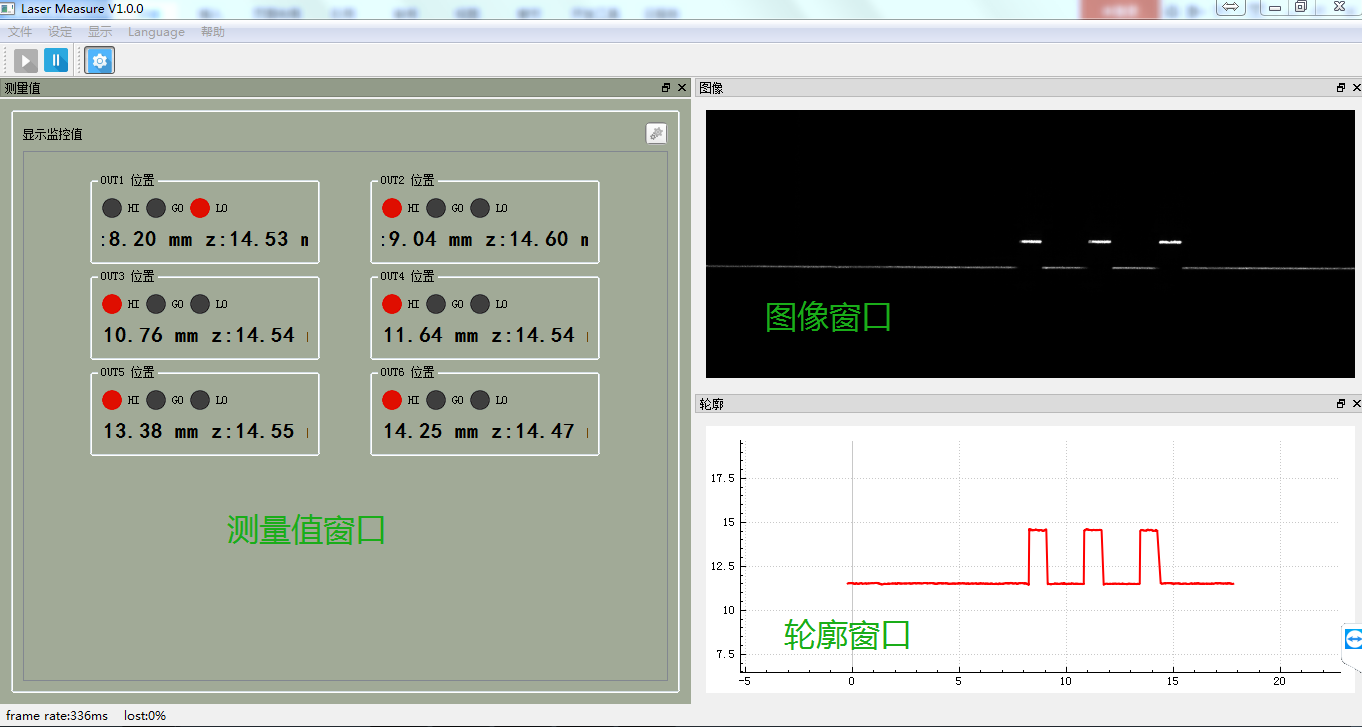
图6
主界面工具栏有3个主要按钮,分别是开始测量,结束,实时设定
开始测量:激光轮廓仪开始采集图像,图像数据和轮廓数据窗体开始活跃,测量结果窗体可能会有部分数据结果呈现
结束:激光轮廓仪停止采集图像,图像数据和轮廓数据窗体停止活跃,测量结果窗体数据不再发生变化
实时设定:打开实时设定的窗体,进行轮廓仪的各种设置。
触发设置
触发设置是设定相机取像的条件及相关内容,如图7

图7
一触发模式:
1. 连续触发:相机按照预先设置好的采样频率(该软件目前是每秒3帧)进行连续取像
2. 外部触发(待开发):相机响应外部信号的一次输入进行一次取像
3. 编码器触发(待开发):相机采样频率由连接的编码器控制,在需要较高精度固定长度取像的情况下使用
触发模式默认情况下为连续触发方式
二编码器触发详细(待开发):
1.输入模式:
2.细化点数:
三触发设定(待开发):
1.采样周期:相机在连续触发模式下采样的周期
2.触发间隔:工件在移动过程中连续取像时可设置,根据采样的周期和工件的移动速度即可算出,将该值输入后以利于后边轮廓仪进行3D图像的处理时使用
四 3D测量设定(待开发):
1. 3D测量点数:相机采样的总帧数,即轮廓仪会将对应数量的轮廓图进行3D合成并处理。
拍摄设置
拍摄设置是为了获取尽可能优良的轮廓画面以利于后续图像数据处理并保持数据的精确,根据不同的材料需要不同的参数,如果进行各种参数调整始终都无法获取优良的轮廓画面,就需要考虑使用不同类型的激光轮廓仪,例如高反光材料就要使用H系列,使用S系列则无法满足精度要求,如图8

图8
一光量设置
1.曝光时间:范围0.1~320ms。曝光时间越长,相机得到的轮廓线条越亮并越粗,相应的杂散光也会增多,每秒钟可连续取像的数量也随之下降。曝光时间越短,相机得到的轮廓线条越暗并越细,相应的咋散光也会减少,每秒钟可以连续取像的数量也会增多。根据不同的材料特性设置不同的曝光时间,最终以获得较为理想的轮廓图像为标准,也要考虑系统需要的效率。
二峰值处理1.选择峰值:近端和远端:在某些情况下可能会出现相机采集的图像中有距离较近的两个线条,选择“近
端”则轮廓提取算法工作时会选择图像上部的线条作为轮廓线,如果选择“远端”则选择图像下部的线条作为轮廓线,如图9

图9标准:如果选择“标准”,则轮廓提取算法工作时会选择图像中最粗最亮的线条作为轮廓线。
峰值处理默认选择“标准”
2.宽度过滤器:
范围0~10mm。相机采集的图像中轮廓线条宽度大于此值则视为多重反射引起的干扰图像,不作为轮廓进行提取,小于此值则作为轮廓线进行提取。默认设置3mm。
3.强度过滤器:
范围0~255。相机采集的图像中轮廓线条组成的像素亮度值小于此值则视为多重反射引起的干扰图像,不作为轮廓进行提取,大于此值则作为轮廓线进行提取。默认设置30。
4.无效数据处理(待开发):
范围0.01~100mm。
三区域选择
左上角列坐标范围0~1270,左上角行坐标0~1000,右下角列坐标范围0~1270,右下角行坐标范围0~1000。区域选择是用户方便设定图像画面特定区域进行数据处理,避免无关区域的一些干扰,如图10,红色区域便是用户选择的工作区域,其他其余不再提取轮廓

图10
轮廓设定
轮廓设置是指相机在安装时因为不可避免会有一定的倾斜度及高度方面的不同,这样直接测量时会出现数据的一些误差,为了克服这些误差,需要在相机首次安装后进行水平及高度比例的校正。如图11。

图11
一倾斜补正
轮廓仪因为在安装过程中不可避免与水平面会有一定的倾斜角度,取到的图像会和理想的水平面有一定角度,如果直接测量会导致测量结果不准确,为了补偿这个角度差,可以使用倾斜补正功能,如图12。
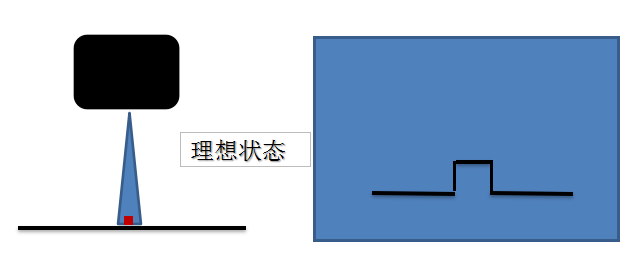

图12
补正方法:
分别选择轮廓线的左边缘和右边缘的直线区域作为倾斜计算区域1和倾斜计算区域2,可以用鼠标拖动光标也可以在输入框直接输入数值,然后点击“计算”,即可将轮廓图像计算成水平效果,如图13。



图13
二高度补正
轮廓仪在首次安装后,因用户安装的高度都会有一定差异,为了试测量的结果保持准确,需要对这个差异进行计算并补偿,注意高度补正前先进行倾斜补正。
补正方法:
将标准测量块(这里使用10mm的测量块)放置于轮廓仪的视场中央,分别选择轮廓线的标准块区域和基准水平线的直线区域作为高度计算区域1和高度计算区域2,可以用鼠标拖动光标也可以在输入框直接输入数值,并在“补正后高度”文本框中输入标准块的高度,然后点击“计算”,即可得到补正后倍率。正常的补正倍率一般在0.9~1.1之间。如图14。


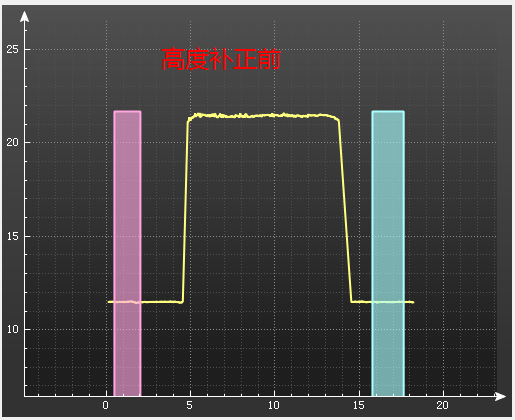

图14
注册主控
注册主控是为了使用位置补正功能,需要提前保存一副原始的图片,以便于后续参照,如图15。

图15
得到理想的轮廓图形后点“注册”即可。
位置补正
正常的测量情况下,会先按照待测物体的形状和位置设置好测量的区域,测量的区域设置后在执行测量过程是不可以更改和变动的。实际测量中,有时可能出现待测的物体发生了位置,脱离了测量的区域,如果还按照原来设置的区域直接去测量就可能会发生测量结果的错误,如图16。

图16
在图16中,粉红色区域是测量区域,红色轮廓线是注册的图形,即在该测量中我们需要的测量值是高处的边缘区域。实际测量中,物体发生了位移,黄色轮廓线是实测的物体位置,如果还按照原来设置的粉红色区域去测量,得到的测量结果就不再是高处的边缘区域了,如果我们还需要高处边缘区域的结果,就需要用到位置补正了。
位置补正有3个页面,“标准补正”,“高级补正”,“补正设置”页面。其中“高级补正”里可以设置“补正1”和“补正2”,如图17。

图17
X补正详解:
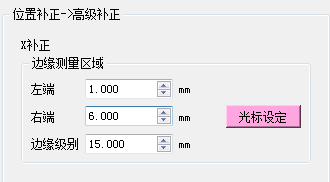
图18
如图18,X补正设置左端和右端是指X方向在此范围区域内实测的物体可以自由移动去寻找和注册图形最接近的位置,边缘级别是指“Z=边缘级别设置值”的一条和水平面平行的直线,如图19。
在粉红色区域内,即1mm<X<6mm的范围内,控制器内部可以计算出实测物体和注册物体之间的距离并进行补偿,按照之前设置好的测量区域得出的结果依然是准确的。
需要注意的是,在设置的X补正区域内,边缘级别线和轮廓线只能有且只有一个交点,超过一个交点测量结果可能失败,少于一个交点也可能得不到正确结果。

图19
Z补正详解:

图20
如图20,Z补正需要设置高度测量区域左端和右端,可以用光标拖动设置或者直接输入数值,补正原理是求得这个区域内的实测物体的平均高度,再减去这个区域内注册物体的平均高度,即可求得实测物体和注册物体的相对Z方向位移,如图21。
在6.626<x<11.899的区域内,测得实测物体的高度即黄色轮廓线,再和注册的高度即红色轮廓线做差值,即可求得Z方向位移,按照之前设置好的测量参数得出的结果依然是准确的。
需要注意的是,设置的Z补正范围内如果是一段水平的直线,则选择高度种类为“平均”,如果此区域内有峰值点或谷值点,则选择“峰值”或“谷值”。
峰值即该区域内的最高点,谷值即该区域内的最低点。

图21
Φ补正详解:

图22
如图22,Φ补正需要设置直线计算区域1,直线计算区域2可选可不选,一般选择是为了在两个区域都有直线的情况下使计算结果更准确。Φ补正的原理是计算出补正区域内的直线角度,然后和注册的图像在该区域的直线角度或者水平线做比较,差值即是需要补偿的值,如图23。
需要注意的是区域选择时一般要选择直线区域,补正的基准可以根据需要选择“水平”或者“主控轮廓”。选择“水平”补偿值就是实测角度和水平线的夹角,选择“主控轮廓”补偿值就是实测角度和注册轮廓的夹角。
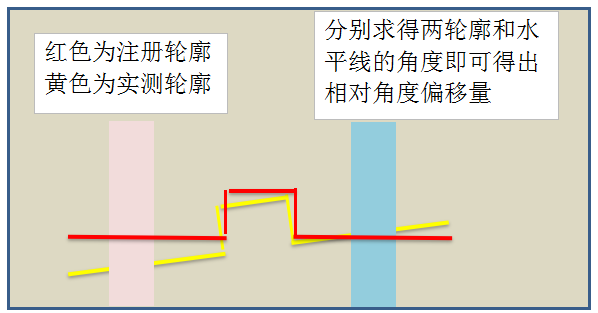
图23
OUT测量设定
OUT测量设定中,用户可选择不同的测量模式,例如高度,高度差,圆角半径,位置等不同内容,然后再详细设置该模式下的测量区域,是否需要位置补正等相关参数。设置后的测量结果会在软件的主界面上显示出来,也可以发送给用户做其他使用。OUT1~OUT16一共16组测量值,可根据需要选择使其全部或部分执行测量工作,如图24。
不同的测量模式设置流程大体相同,主要区别在设置区域不同或区域特征选择方式不同,这些不同会在本章节后面部分列表展示,现在以“高度差测量模式”为例说明设置流程。
1.选中OUT1~OUT16任意一组测量值,选择“设定”,如图24。

图24
2.“测量模式”中选择需要测量的内容,本例选择“高度差”,如图25。

图25
3.测量模式详细中选择需要的位置补正方式,根据实际需要自由选择“无补正”,“标准补正”,“高级补正1”,“高度补正2”。最小显示单位根据需要自由选择,如图26。

图26
4.选择“详细设定”进入详细设定页面,在此页面设置需要测量的基准区域和测量对象区域,可通过光标拖动设置或输入数值进行设置,该区域可以在“设定”里选择“平均”,“峰值”,或者“谷值”,“弯曲点”,如图27。
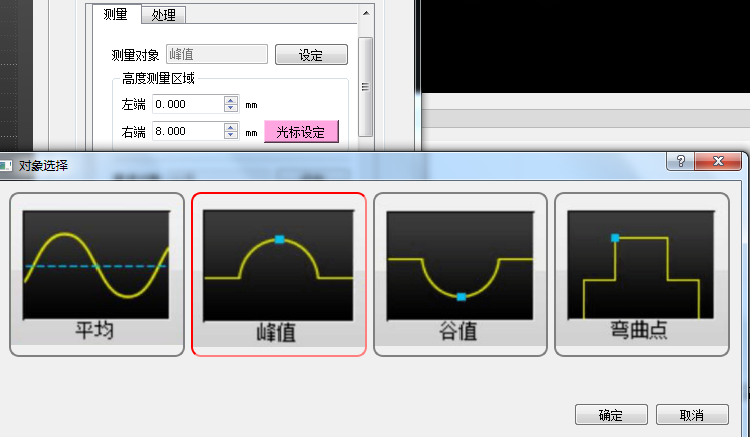
图27
注:“平均”指该区域高度的平均值,“峰值”指该区域的最高点,“谷值”指该区域的最低点。“弯曲点”是指直线拐角的点,从左向右如果经过拐角点后直线上扬,则该点称为“谷型”,如果直线下跌,则该点称为“山型”,如果测量区域内不止一个弯曲点,则按照需要选择输出第几个点。
5.确定完成后,点击实时设定的“完成”按键,该页面关闭,主画面测量值窗口会显示对应的OUT测量值,如图28.
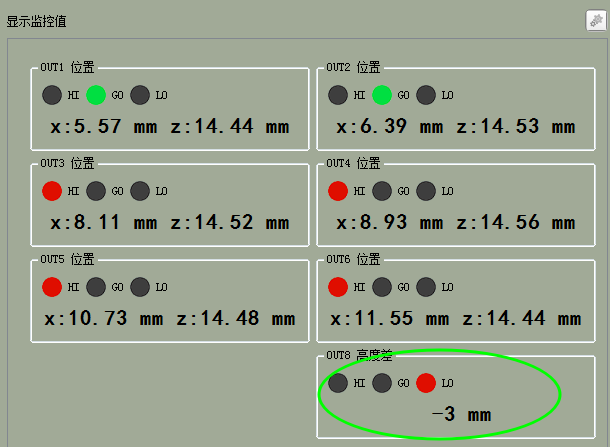
图28
选择不同的测量模式,在测量区域数量和区域特征上有不同,如表2。
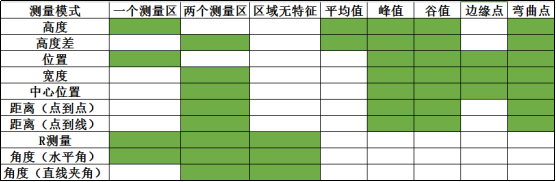
表2
注:边缘点是指“Z=边缘级别”的一条和水平线平行的直线与轮廓线的交点,边缘点的左侧轮廓线如果比右侧的轮廓线低,则称为“上升”,边缘点的左侧轮廓线如果比右侧的轮廓线高,则称为“下降”,如图30。在设定区域内如果不止一个边缘点则按照需要选择输出第几个点。
